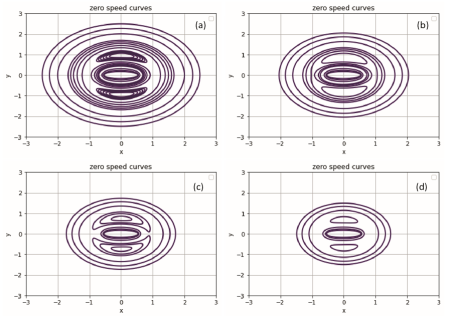
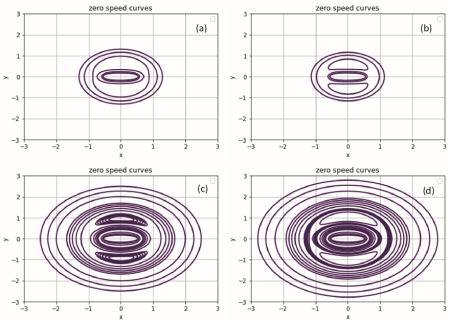
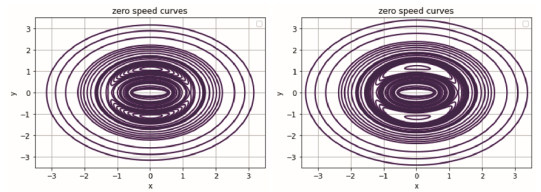
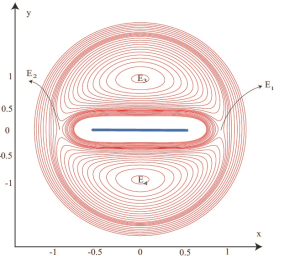
Calculating the gravitational potential generated by non-spherical mass distributions is an old problem that has been tackled by astronomical researchers. The majority of small celestial objects have an elongated shape with a non-uniform mass distribution. Early work in this field modelled these elongated bodies as segments with a uniform mass distribution. In a previous work, we established the analytical form of the potential generated by an asteroid modelled by a linear and inhomogeneous repair whose mass density is a polynomial of order four. We have studied the dynamic behavior of a test particle in the vicinity of this asteroid, which is assumed to be at rest, and have extracted periodic orbits under certain conditions. Every celestial object has an angular momentum due to its own rotation. This result in competition between gravitational attraction and centrifugal repulsion in the synodic reference frame linked to the object. This led us to focus our research on the existence of relative equilibrium positions. We calculated the Jacobi integral analytically and used the zero velocity curves numerically to extract four equilibrium positions, two isosceles and two equilateral.
| Published in | American Journal of Astronomy and Astrophysics (Volume 12, Issue 1) |
| DOI | 10.11648/j.ajaa.20251201.11 |
| Page(s) | 1-8 |
| Creative Commons |
This is an Open Access article, distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution and reproduction in any medium or format, provided the original work is properly cited. |
| Copyright |
Copyright © The Author(s), 2025. Published by Science Publishing Group |
Equilibrium, Integral Jacobi, Zero Speed, Synodic
NEAR | Near Earth Asteroid Rendezvous |
| [1] | Riaguas A, Elipe A, Lara M. Periodic orbits around a massive straight segment. Celest. Mech. Dyn. Astron. 1999; 73(1-4): 169-78. |
| [2] | Elipe A, Lara M. A simple model for the chaotic motion around (433) Eros. J. astronaut. sci. 2003; 51: 391-404. |
| [3] | Elipe A, Lara M. A simple model for the chaotic motion around (433) Eros. Adv. Astronaut. Sci. 2004; 116: 1-5. |
| [4] | Ellipe, A. and Lara, M. 2003, The Journal of Astronautical Sciences, 51, 391. |
| [5] | Najid NE, Zegoumou M. Potential generated by a massive inhomogeneous straightsegment. Res. Astron. Astrophys. 2011; 11(3): 345. |
| [6] | Najid NE, El Elourabi H. Equilibria and stability around a straight rotating segment with a parabolic profile of mass density. Open Astron. J. 2012; 5(1). |
| [7] | El haj El ourabi, Mohamed Bennai. Modelling the Dynamics of a Probe in Vicinityof Eross-433 With a Fourth-Order Polynomial Density Profile, 29 June 2023. Journal of Physics and Astronomy. Vol 11, Iss 8. |
| [8] | Werner RA. The gravitational potential of a homogeneous polyhedron or don’t cutcorners. Celest. Mech. Dyn. Astron. 1994; 59: 253-78. |
| [9] | Werner RA, Scheeres DJ. Exterior gravitation of a polyhedron derived and compared with harmonic and mascon gravitation representations of asteroid 4769 Castalia. Celest. Mech. Dyn. Astron. 1996; 65: 313-44. |
| [10] | Bartczak P, Breiter S. Double material segment as the model of irregular bodies. Celest. Mech. Dyn. Astron. 2003; 86(2): 131-41. |
| [11] | Bartczak P, Breiter S, Jusiel P. Ellipsoids, material points and material segments. Celest. Mech. Dyn. Astron. 2006; 96: 31-48. |
| [12] | Najid NE, Zegoumou M, El Elourabi H. Dynamical behavior in the vicinity of acircular anisotropic ring. Open Astron. J. 2012; 5(1). |
| [13] | NEAR. Special Issue on the NEAR Mission to 433 Eros. J Astronaut Sci 1995; 43: 477. |
| [14] | Schwehm G, Hechler M. Rosetta -ESA’s planetary cornestone mission. ESA Bull1994; 77: 7-18. |
| [15] | Pal, A. K., Abouelmagd, E. I., Kishor, R. Effect of Moon perturbation on theenergy curves and equilibrium points in the Sun–Earth–Moon system. New Astronomy, 2021; 84, 101505. |
| [16] | Zotos, E. E., Abouelmagd, E. I., Abd El Motelp, N. S. Introducing a new version of the restricted three-body problem with a continuation fraction potential. New. Astronomy, 2020; 81, 101444. |
APA Style
Ourabi, E. H. E., Bennai, M. (2025). Equilibrium Positions in a Gravitational Field Generated by an Elongated Asteroid with Density of Order 4. American Journal of Astronomy and Astrophysics, 12(1), 1-8. https://doi.org/10.11648/j.ajaa.20251201.11
ACS Style
Ourabi, E. H. E.; Bennai, M. Equilibrium Positions in a Gravitational Field Generated by an Elongated Asteroid with Density of Order 4. Am. J. Astron. Astrophys. 2025, 12(1), 1-8. doi: 10.11648/j.ajaa.20251201.11
@article{10.11648/j.ajaa.20251201.11,
author = {El Haj El Ourabi and Mohammed Bennai},
title = {Equilibrium Positions in a Gravitational Field Generated by an Elongated Asteroid with Density of Order 4
},
journal = {American Journal of Astronomy and Astrophysics},
volume = {12},
number = {1},
pages = {1-8},
doi = {10.11648/j.ajaa.20251201.11},
url = {https://doi.org/10.11648/j.ajaa.20251201.11},
eprint = {https://article.sciencepublishinggroup.com/pdf/10.11648.j.ajaa.20251201.11},
abstract = {Calculating the gravitational potential generated by non-spherical mass distributions is an old problem that has been tackled by astronomical researchers. The majority of small celestial objects have an elongated shape with a non-uniform mass distribution. Early work in this field modelled these elongated bodies as segments with a uniform mass distribution. In a previous work, we established the analytical form of the potential generated by an asteroid modelled by a linear and inhomogeneous repair whose mass density is a polynomial of order four. We have studied the dynamic behavior of a test particle in the vicinity of this asteroid, which is assumed to be at rest, and have extracted periodic orbits under certain conditions. Every celestial object has an angular momentum due to its own rotation. This result in competition between gravitational attraction and centrifugal repulsion in the synodic reference frame linked to the object. This led us to focus our research on the existence of relative equilibrium positions. We calculated the Jacobi integral analytically and used the zero velocity curves numerically to extract four equilibrium positions, two isosceles and two equilateral.
},
year = {2025}
}
TY - JOUR T1 - Equilibrium Positions in a Gravitational Field Generated by an Elongated Asteroid with Density of Order 4 AU - El Haj El Ourabi AU - Mohammed Bennai Y1 - 2025/01/07 PY - 2025 N1 - https://doi.org/10.11648/j.ajaa.20251201.11 DO - 10.11648/j.ajaa.20251201.11 T2 - American Journal of Astronomy and Astrophysics JF - American Journal of Astronomy and Astrophysics JO - American Journal of Astronomy and Astrophysics SP - 1 EP - 8 PB - Science Publishing Group SN - 2376-4686 UR - https://doi.org/10.11648/j.ajaa.20251201.11 AB - Calculating the gravitational potential generated by non-spherical mass distributions is an old problem that has been tackled by astronomical researchers. The majority of small celestial objects have an elongated shape with a non-uniform mass distribution. Early work in this field modelled these elongated bodies as segments with a uniform mass distribution. In a previous work, we established the analytical form of the potential generated by an asteroid modelled by a linear and inhomogeneous repair whose mass density is a polynomial of order four. We have studied the dynamic behavior of a test particle in the vicinity of this asteroid, which is assumed to be at rest, and have extracted periodic orbits under certain conditions. Every celestial object has an angular momentum due to its own rotation. This result in competition between gravitational attraction and centrifugal repulsion in the synodic reference frame linked to the object. This led us to focus our research on the existence of relative equilibrium positions. We calculated the Jacobi integral analytically and used the zero velocity curves numerically to extract four equilibrium positions, two isosceles and two equilateral. VL - 12 IS - 1 ER -
Quantum Physics and Magnetism Team Laboratory of Condensed Matter Physics, Faculty of Science Ben M’sik, Hassan II University, Casablanca, Morroco
Quantum Physics and Magnetism Team Laboratory of Condensed Matter Physics, Faculty of Science Ben M’sik, Hassan II University, Casablanca, Morroco
Information